丒24CH.RC僒乕儃儌乕僞乕僐儞僩儘乕儔
侾丏奣梫
丂丂偛梫朷偺懡偐偭偨儘儃僢僩嶌傝偵傛偔棙梡偝傟傞俼俠僒乕儃儌乕僞乮塃幨恀乯
丂丂偺僐儞僩儘乕儔傪帋嶌偟偰傒傑偟偨丅
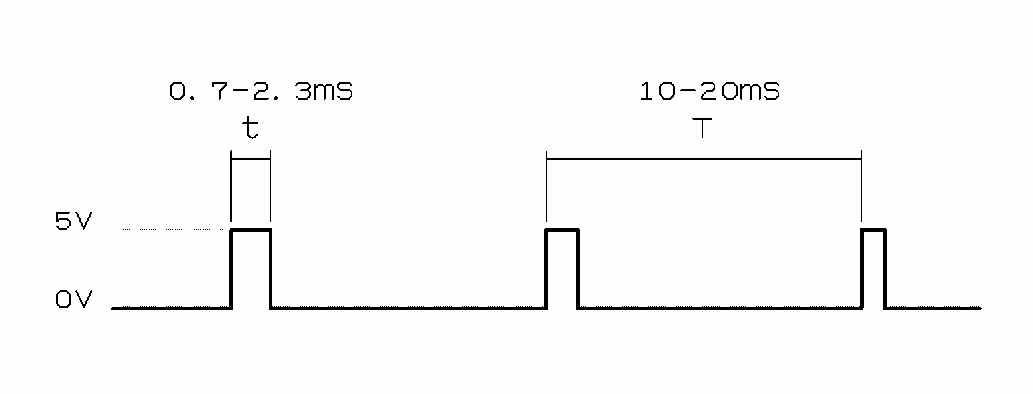
丂丂俼俠僒乕儃儌乕僞偼塃壓恾偺傛偆偵梌偊傜傟偨僷儖僗暆 倲 傪埵抲巜椷偲偟偰
丂丂惂屼偝傟傑偡丅
丂丂倲 =侾丏俆mS亇侽丏俈俆倣俽偵懳偟偰夞揮妏侾俉侽搙偺傛偆偵寛傔傜傟偰偄傑偡丅
丂丂僷儖僗廃婜 俿 偵偼埶懚偟傑偣傫偑丄儗僗億儞僗側偳傪峫椂偟偰侾侽乣俀侽倣俽
丂丂掱搙偵慖偽傟傞傛偆偱偡丅
丂丂俼俠僒乕儃儌乕僞偺庬椶偵傛傝丄偙傟傜偺抣偼庒姳堎側傞傛偆偱偡偐傜丄
丂丂偁傜偐偠傔偛妋擣壓偝偄丅
丂丂俫俉/俁俇俋係俥偵偼俁憡偺俹倂俵傪敪惗偡傞侾俇價僢僩僞僀儅乕倂偑偁傝傑偡偺偱
丂丂偙傟傪巊偭偰惢嶌偡傞偙偲偵偟傑偡丅
俁丏夞楬恾
丂丂忋婰偺峔憐偵婎偯偄偰愝寁偟偨俀係俠俫丂俼俠僒乕儃僐儞僩儘乕儔偺
丂丂夞楬恾傪暿巻偵帵偟傑偡丅
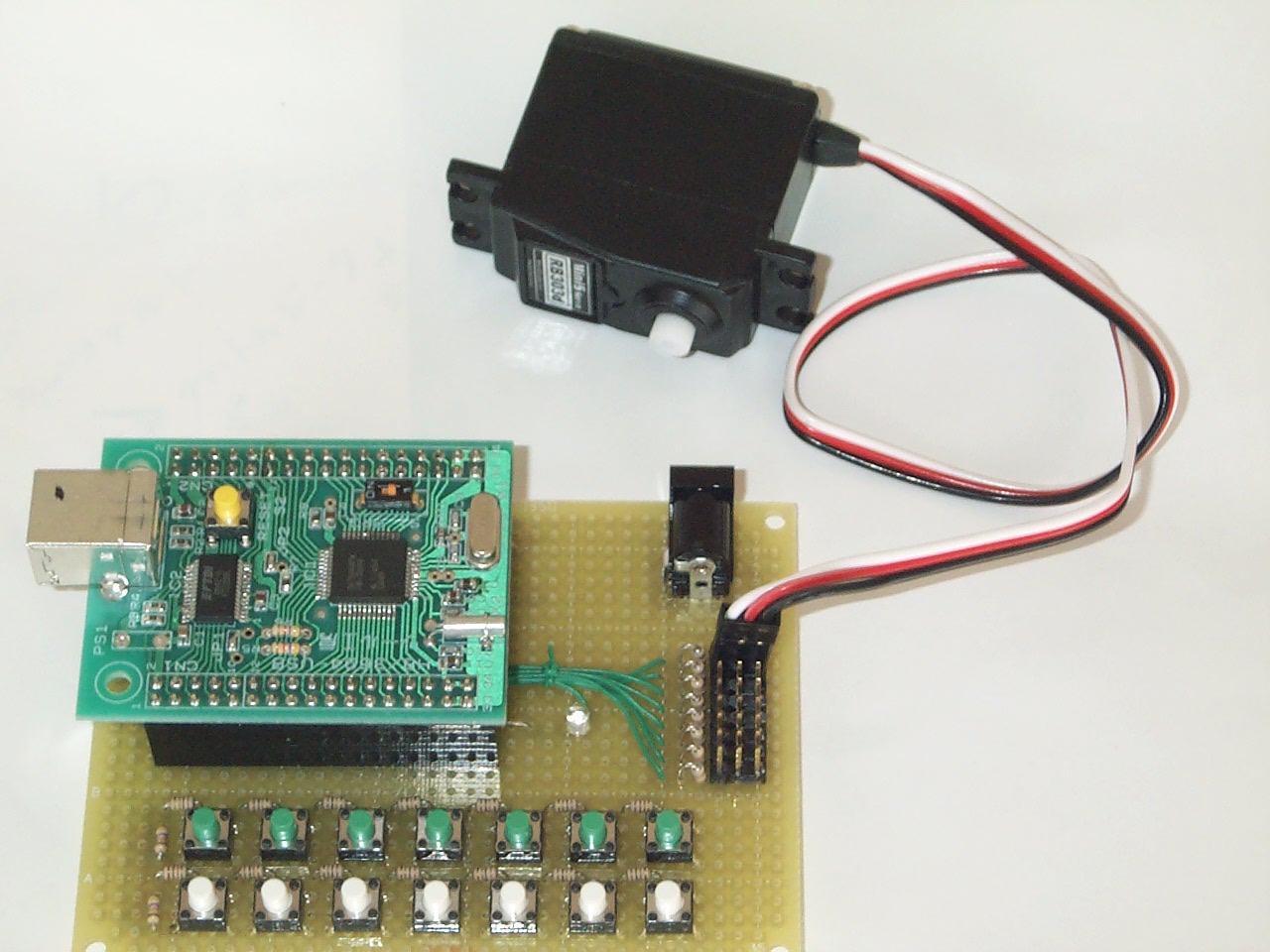
丂丂偲傝偁偊偢丄塃幨恀偺傛偆偵俉俠俫暘偺傒傪慻傒棫偰偰幚尡偟傑偟偨丅
丂丂僨儌梡傪寭偹偰偄傑偡偺偱庤摦偺儃僞儞偑暲傫偱偄傑偡偑丒丒丒丒丒丅
丂丂乮庤偭庢傝憗偔帋偟偰尒偨偄曽丒夞楬傪慻傓偺偑柺搢側曽偼乯
丂丂乮俥俿俬俷俛丄俥俿俬俷俠丄俥俿俬俷俢傪偦傟偧傟俼俠僒乕儃儌乕僞偵丂乯
丂丂乮愙懕偟丄娙堈斉丂俁俠俫丂俼俠僒乕儃僐儞僩儘乕儔偺僒儞僾儖乯
丂丂乮僾儘僌儔儉傪偍巊偄壓偝偄丅丂丂CH.0 CH.8 CH.16 偺傒丂丂乯
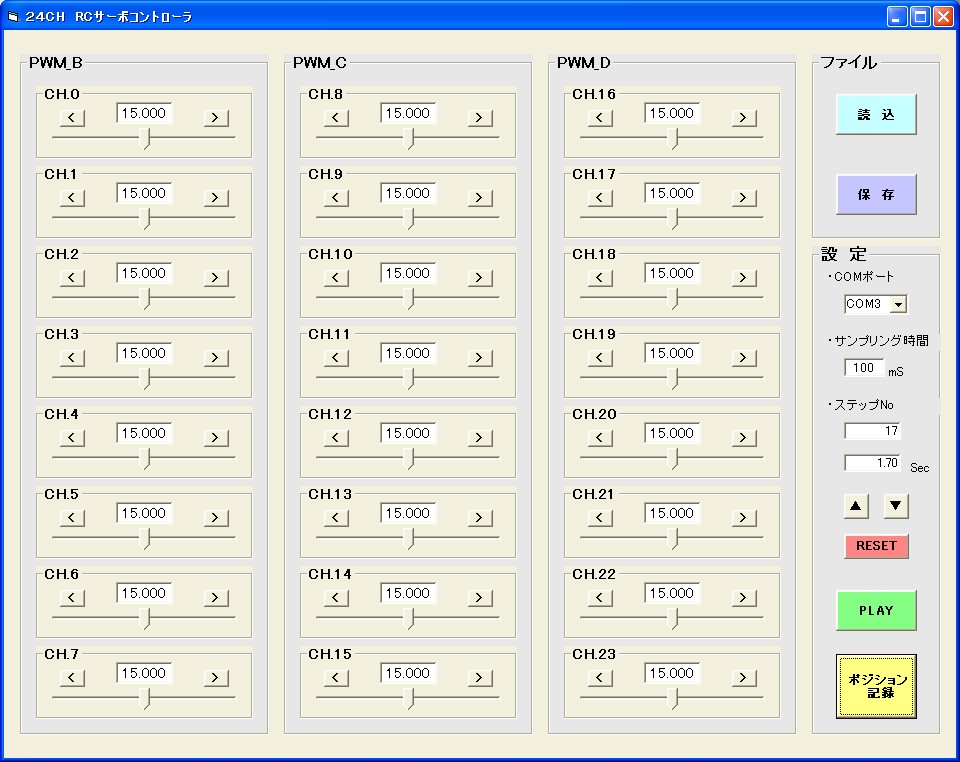
係丏僜僼僩僂僄傾
丂丂僜乕僗儕僗僩傪尒偰偄偨偩偗偽傢偐傝傑偡偑曄悢RC_posi[CH]偵抣傪戙擖偡傞偩偗偱奺僠儍儞僱儖偺
丂丂惂屼傪峴偆偙偲偑偱偒傑偡丅戙擖偡傞抣偼俇侽侽侽乣俀係侽侽侽偱僷儖僗暆侽丏俇倣俽乣俀丏係倣俽偵憡摉偟傑偡丅
丂丂傑偨倀俽俛傪捠偟偰俹俠偐傜傕惂屼偱偒傞傛偆僐儅儞僪傪梡堄偟傑偟偨丅
丂丂僐儅儞僪偼僶僀僫儕係僶僀僩偱乮0xFF, CH_No, RC_posi_Hi, RC_posi_Lo乯傪憲傞偩偗偱丄墳摎偼偁傝傑偣傫丅
丂丂幚嵺偵偼侽丏侾昩偔傜偄偺娫妘偱侾偙傑枱夋偺傛偆偵奺俠俫偺億僕僔儑儞傪寛傔側偑傜丄堦楢偺摦嶌傪僥傿乕僠儞僌偟
丂丂偙傟傜偺摦嶌傪慻傒崌傢偣傞傛偆僾儘僌儔儉偡傞偺偑娙扨偱偼側偄偐偲峫偊偰偄傑偡丅
丂丂偙偺偨傔僥傿乕僠儞僌僨乕僞偑俥俴俙俽俫偵廂傑傜側偗傟偽夞楬恾偵帵偡傛偆偵俬俀俠愙懕偺俤俤俹俼俷俵傪捛壛
丂丂偡傞偺傕梕堈偵偱偒傑偡丅
丂丂傑偨奺俠俫偺埵抲曗姰傗庬乆偺寁嶼傪偟側偑傜惂屼偡傞偨傔偵偼丄H8/3694偱偼椡晄懌偱俁俀價僢僩僋儔僗偺
丂丂儅僀僐儞傪忋埵俠俹倀偲偟偰丄俬俀俠僀儞僞乕僼僃乕僗傪巊偭偰僐儅儞僪傪傗傝庢傝偟側偑傜惂屼偡傞昁梫偑偁傞偱偟傚偆丅
丂丂偙偺応崌偼扨婡擻偺俼俠僒乕儃僐儞僩儘乕儔偲偟偰摦嶌偟丄係俉俠俫丄俈俀俠俫丒丒丒丒偺傛偆偵憹愝偡傞偙偲傕峫偊傜傟傑偡丅
丂丂嘆丂娙堈斉丂俁俠俫丂俼俠僒乕儃僐儞僩儘乕儔丂僒儞僾儖僜僼僩乮俫俤倂係丒俠尵岅乯
丂丂嘇丂俀係俠俫丂俼俠僒乕儃僐儞僩儘乕儔丂僒儞僾儖僜僼僩乮俫俤倂係丒俠尵岅乯
丂丂嘊丂俹俠懁丂僥傿乕僠儞僌僜僼僩丂乮奐敪拞乯丂丒丂夋柺僀儊乕僕

乮俼俠僒乕儃儌乕僞乕乯

{kind=link}